西安交大学子获第十届全国海洋航行器设计与制作大赛一等奖
第十届全国海洋航行器设计与制作大赛暨第三届“海上争锋”中国智能船艇挑战赛在上海交通大学举行。西安交通大学首次参加该项赛事,选派的三支队伍均入围全国总决赛,最终获得全国一等奖1项,二等奖2项。
本届大赛由中国科学技术协会、中华人民共和国工业和信息化部指导,由中国造船工程学会、国际船舶与海洋工程创新与合作组织、中国船舶集团有限公司等主办。围绕新概念创意设计、舰船模型智能航行与特种作业、海上智能感知、舰船航行虚拟仿真等科目设置11个组别,吸引了包括来自清华大学、浙江大学、上海交通大学、西安交通大学、哈尔滨工业大学、荷兰代尔夫特理工大学、挪威斯塔万格大学、英国斯特莱斯克莱德、中国船舶集团有限公司第七〇五研究所、西安精密仪器研究生等国内外389所高校及相关科研单位的1985件作品参赛,参赛师生达8985人。经过区域赛赛评与推荐,共有128所院校的666件作品入围全国决赛。受疫情影响,今年比赛采取线上线下相结合的形式举办。
全国海洋航行器设计与制作大赛经过10年的发展,现已经成为我国船舶与海洋工程领域层次最高、规模最大、覆盖面最广的学科竞赛。大赛以“崇尚科学、实践求知、锐意创新、面向海洋、服务国防”为目的和宗旨,以切实增强船海及相关专业学生的综合素质、原创能力及实践动手能力为核心,紧密结合行业高校优势和特色,推动船舶与海洋工程装备产学研一体化发展。对高层次、应用型船海工程技术人才培养、助推我国海洋强国战略建设发展具有重要意义。
西安交大高度重视学生工程创新意识以及创新能力、实践能力培养,通过大赛积极探索多维能力导向的教学体系下工程领军人才贯通培养模式。本次大赛由实践教学中心统筹,机械学院具体组织实施。本次比赛取得的成绩充分反映了学校构建“一个目标、两个原则、三大任务、四项举措”的“一二三四”实践教学和创新创业教育生态体系,以大学生学科、科技竞赛为项目驱动,培养学生创新创业能力,催生创新创业成果方面持续发力,在打造具有西安交大特色的实验实践教学和创新创业教育体系方面取得积极进展。
获奖作品介绍
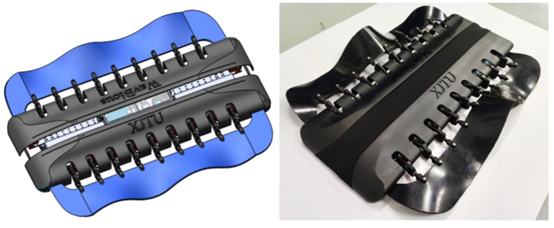
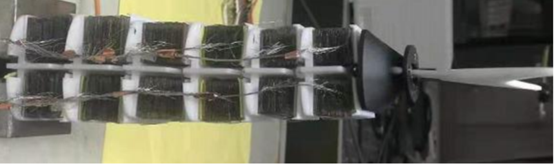
水陆两栖仿生柔性鳍波动式机器人
获奖等级:新概念创新设计组 全国一等奖、西北赛区第一名
获奖学生:2020、2019级研究生 童保成、李士杰、曾杨彬、陈振汉、张堂佳
指导教师:胡桥
该项目团队提出了一种新型仿生柔性鳍波动式水陆两栖机器人,该机器人效仿线翎电鳗波动式推进机理,通过柔性鳍面与水相互作用实现水中的灵活运动,具备真实鱼类水中游动机动性强、推进效率高和环境扰动性小等优点。同时可将其运动机理应用于陆上,进行由陆地到水下的自主运动,完成水下资源探测、信息收集及目标跟踪等任务,机器人具备一定的载荷能力,可进行物资运输,同时还可用于科研考察、海洋打捞等领域。
基于电致动人工肌肉的水下仿生鱼尾
获奖等级:新概念创新设计组 全国二等奖、西北赛区一等奖
获奖学生:2020级研究生 李兆峰、董晨源、程随军、李一鸣
指导教师:朱子才
该项目团队基于 PVCG 人工肌肉的驱动特性,模拟鱼尾宏微观构型提出了一种推进器的多重仿生结构设计。通过柔性人工肌肉与刚性骨架设计刚柔耦合仿生鱼尾推进系统,实现可调控的大幅度连续弯曲摆动。具有噪声低,高柔性,能耗低且造价低廉的特点。该仿生航行器可以实现水下高效灵活隐蔽地游动,不管在军用还是民用方面都有巨大的研究价值。


随缘工作号
获奖等级:设计与制作——水面组 全国二等奖、西北赛区第一名
获奖学生:2020级、2019级本科生 黄轩浩、黄志恒、周云峰、瑜熙敬、杨帅
指导教师:权双璐、胡桥
该项目团队设计并制作的“随缘工作号——遥控自主双模式水下机器人”,以高韧树脂材料3d打印制作整体框架,以树莓派处理视觉信息,stm32控制运动。在遥控模式下,操控者可通过摄像头辅助控制机器人运动。在自主运动模式下,机器人能够自主沿管道行进,并具有视觉和陀螺仪两种行进控制方法。行进过程中,还可对管道上的不同吸附物进行不同灯光报警。机器人正常状态是低速运行,危险性较低。可为石油管道检测和水下资源探测研究提供一些可行的思路。
【免责申明】本专题图片均来源于学校官网或互联网,若有侵权请联系400-0815-589删除。